Jak snadno naladit koptéru? V tomto článku projdu krok za krokem proces ladění ve formě “taháku”, co si můžete vytisknout a použít jako základní instrukce.
Tento článek nemíří na úplné začátečníky v Betaflight. Neberte to jako detailní manuál, spíše body, které je třeba následovat při tuningu.
¶ Potřebný SW
- Betaflight Configurator
- Betaflight Blackbox Explorer
- PID Toolbox - v tuto chvíli jde o placený SW, ale dobrá zpráva je, že je možné zaplatit pouze 1 měsíc subscription na Patreon a získáte aktuální verzi SW na pořád. Více ZDE
¶ Nastavení koptéry před tuningem
- Nastav blackbox + 2 kHz + GYRO_SCALED
- Načti Preset for RC link - správnou frekvenci!
- Bidirectional DSHOT kvůli RPM filtrům (pozor pro BLS regulátory je nutná flashnout Bluejay)
- Nastav si ANGLE mode na switch (volitelně)
¶ Krok za krokem
¶ 1. Filter tuning
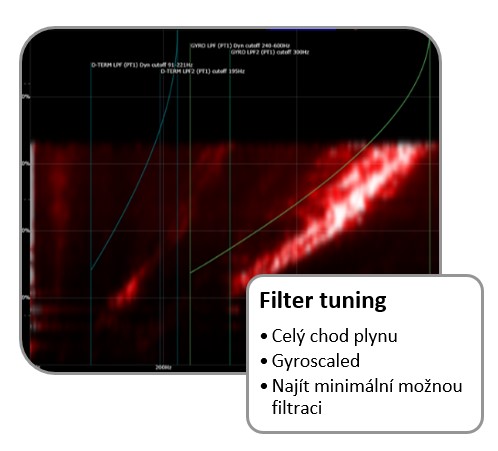
- Lítejte v Angle/acro
- Postupné navyšování plynu 0 – 100 %
- Otevři Blackbox Explorer, vyberte „Gyro Scaled [Roll] “ (postupně ověřit všechny osy) a maximalizujte “analyze window”
- Vyberte Frequency vs. Throttle plot and all filters.
- Najít nejnižší frekvenci kde je šum - odpovídá LPF pro D-term
Cílem je minimalizovat filtraci (protože ta vnáší do celé regulační smyčky zpoždění) tím, že se použije pouze jeden filtr (plus RPM filtr - ten by měl být aktivní, jeho přínos převáží zpoždění).
Lítejte klidně v angle někde na louce a pumpujte plynem z nuly na 100%. Snažte se minimalizovat vnější vlivy jako nárazy ;). Ideální je vyletět po armu rovnou nahoru a disarmnout ještě ve vzduchu před “drcnutím” o zem.
Stáhněte si blackbox záznam z letu a otevřete ho v Blackbox Exploreru a vyberte „Gyro Scaled [Roll] “ a postupně pak další osy. Obvykle se ale vibrace nejsíce projeví v rollu.
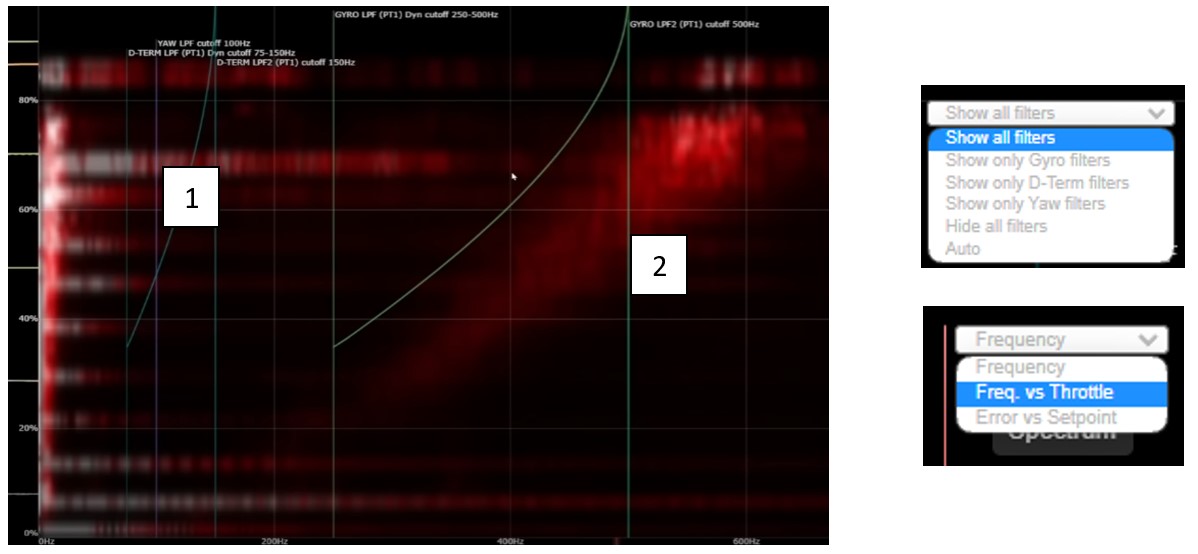
Maximalizujte analytické okno a nastavte dle obrázku výše.
Čím je na grafu světlejší barva, tím je vibrace (šum) silnější. lze pozorovat tři případy, kdy se objevují světlejší čáry:
- Horizontální čáry - odpovídá klepání na všech frekvencích při konstatním plynu. Toto je pravděpodobně externí zdroj - náraz. Tyto nás nezajímají
- prohnuté čáry šumu od potorů - tyto jsou ty, co chceme filtrovat
- Úplně vlevo - nejnižší frekvence která ale nejsou vibrace rámu ale řízení. Ty nás také nezajímají.
Zajímá nás primárně tedy prohnutá čára šumu od motoru, kterou chceme filtrovat. pokud tam máte hodně bíle a třeba i čáry na nižších frekvencích - ověřte dotaženost všech šroubů, ře není nic nalomené, motory nejsou zohýbané a vrtule jsou v pořádku.
Vyčteme si teda nejnižší frekvenci na šumu z motorů (na obrázku je to cca 270 Hz) a tuto použijeme jako spodní hranici pro low pass filtr (propouští nízké frekvence - ovládání a filtruje vysoké - šum).
V Betaflight jsou dva low pass filtry:
- Gyro
- D-term
Cílem je, jak už jsem zmiňoval, filtry minimalizovat = použijeme pouze jeden D-term filtr a ostatní vypneme. Pokud je koptéra alespoň trochu hezký build, musí to stačit.

Dle obrázku nechte aktivní pouze D Term Lowpass 1, a nastavte Biquad filtraci. Frekvence nastavte dle grafu - čím vyšší budou, tím bude zpoždění menší, ale pozor ať nejsou moc vysoké aby se filtroval šum z motorů.
Obvyklé frekvence pro různé velikosti vrtulí najdete v následující tabulce:
| Velikost vrtule | BIQUAD D-Term filtr low cutout |
| < 3" | 100 – 125 Hz |
| 4" | 90 – 110 Hz |
| 5" - 6" | 80 – 110 Hz |
| 7" < | 75 – 100 Hz |
Pozor - ověřte si po testovacím letu teplotu motorů. Protože jsme ubrali filtraci, jde toho více do nich a ačkoli ony proudové pulzy nedokážou mechanicky převést na točení, tak je zahřívají. motory by měli zůstat “studené”. Tedy ne studené, ale neměli byste se o ně spálit…
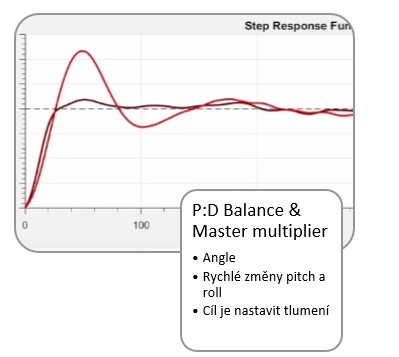
¶ 2. PID tuning
- Vypněte (nastavte na 0) I term a FF.
- Lítejte Angle mode (volitelně)
- Rychle kmitejte doleva / doprava a dopredu / dozadu přibližně 20 vteřin.
- V OSD menu upravujte hodnoty sliderů (nejprve D-term a pak Master multiplier)
- PI slider pro nalezení poměru P a D
- Master multiplier na zrychlení odezvy
- Porovnáme různé hodnoty v PID Toolboxu
Cílem tohoto kroku je nají P:D balanc a hodnotu master multiplier. P složka je zodpovědná za rychlost reakce na ovládání a D je tlumení - tlumí “vnější” vlivy jako právě vibrace a klepání. Pro tyto dvě musí být pro konkrétní koptéru nalezen balanc kdy bude koptéra ideálně kopírovat požadovanou výchylku. poté můžeme postupně zvyšovat master multiplier až bude koptéra reagovat jak nejrychleji dokáže.
Před letem stáhněte na 0 I-term i FF - zasahovaly by nám do nastavení P a D a zabývat se jimi budeme až později.
Nejsnadněji testovací let provedete na angle - snadno budete dronem “klepat” dopředu a dozadu / doleva a doprava. Je třeba mezi jednotlivými army vždy změnit (třeba v OSD menu) PI slider. Začněte třeba na 0,6 a po kroku 0,2 jděte někam k 1,2. Následně logy načtěte do PID Toolboxu.
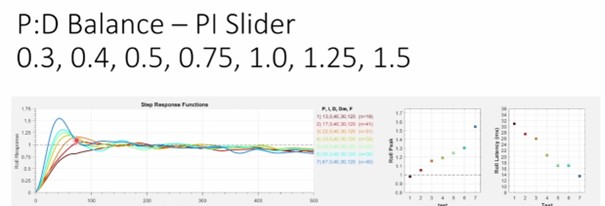
Dle obrázku je vidět, že nejlepší odezvu (nejrychleji jde k jedničce, ale nepřekmitne) má nodnota 0,4. Takže 0,4(P):1(D) odpovídá poměru 2,5 mezi složkami P a D. Tento budete chtít později dodržovat.
Nyní zopakujte let, kdy bude už poměr P a D 2,5 nebo kolik vám vyšlo jako ideální a udělejte opět několik letů s různým nastavení master multiplier:

Opět vybereme křivku, která nejlépe (nejrychleji) dosáhne úrovně 1 a zároveň jí nepřestřelí. Pokud byste potřebovali master více než dva - navyšte P a D (pozor na dodržení určeného poměru mezi nimi) a zopakujte lety pro různé master hodnoty.
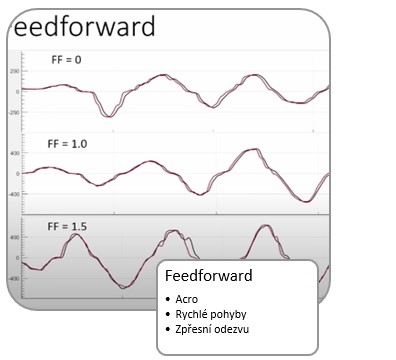
¶ 3. Feedforward
- Nastavte I term zpět na 1
- Acro mode, rychlé rolly a flipy
- Měnte hodnotu FF v OSD menu
- Porovnejte hodnoty v PID Toolbox
Feedforward se snaží sledovat pohyb páček a předvídat, zda co uděláte dál - zda už zpomalujete nebo pohyb zrychlujete a podle toho přidává nebo ubírá.
Tyto lety už dělejte v Acro módu a zase rychlé otočky ve všech osách.
Opět v OSD nastavte několik hodnot FF, mezi kterými pak budete v PID Toolboxu vybírat.
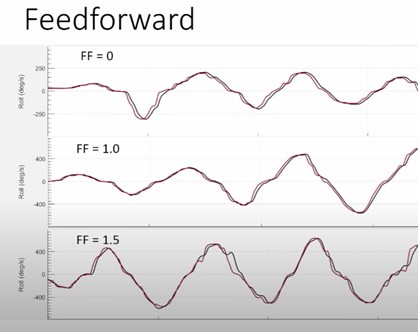
Čím jsou si průběhy bližší (červený je pohyb páček a černá koptéry), tím máte lepší reakci. Pokud máte vysoký D*-term, můžete očekávat i vysoký FF. Přiliž vysoký FF ale může zesilovat šum ze sticků a rc linku.
¶ Závěr
Tento návod vás provedl třemi základními kroky při lazení:
Filtr → D-term → P-term → Feedforward
Nyní by koptéra měla reagovat na vaše řízení čistě, bez klepání či překmitů. Měla by reagovat rychle, ale motory by měly zůstat “studené”. Čti udržím na nich v pohodě ruku.
Lazení koptéry patří mezi složitější úkony a spoustě pilotů bude vyhovovat default z Betaflight nebo použijí preset. Pokud jste se ale pustili do lazení sami - hodně štěstí a výsledek bude určitě stát za to.
Poznámka na závěr: nejsložitější na celém lazení je rozjet PID Toolbox. k tomuto si ideálně dohledejte návod předtím než se o instalaci pokusíte sami. Intuitivní to opravdu není…