¶ Rám dronu (frame)

Stejně jako potřebují auta karoserii, tak i drony potřebují rámy, na které jsou uchyceny ostatní komponenty dronů. Rám musí být lehký, ale zároveň také tuhý kvůli zamezení vibrací dronu při letu a odolný kvůli možným pádům a nárazům. Proto se na výrobu rámů používají materiály, jako je např. karbon a nebo slitina hliníku 7075, která se používá pro výrobu trupů letadel, křídel, podvozků, motorů a dalších dílů. Aktuálně je nejpoužívanější velikost rámu 5″. Je to vpodstatě taková univerzální velikost, vhodná jak pro freestyle létání, tak i pro závodění, ale zároveň ještě né moc velká např. pro převážení v batohu nebo v kufru. Pokud jste tedy na začátku cesty létání s FPV dronem, určité neuděláte chybu výběrem právě této velikosti 5″ rámu. Pro long-range létání se pak doporučují spíše rámy větší, např. rámy velikosti 7″, na které lze připevnit větší vrtule s úspornějšími motory a hlavně baterii s větší kapacitou, která pak podstatně prodlouží dobu letu.
¶ Motory

Motory dronů mají spoustu parametrů, zde se ale pro jednoduchost zaměříme pouze na ty základní.
velikost motorů – typicky např. 2506, kde 25 označuje šířku statoru v milimetrech a 06 výšku statoru v milimetrech. Stručně řečeno platí, že čím větší motor a tedy i plocha magnetů statoru, tím větší kroutící moment motor má.
rychlost otáčení motorů – značí se jako KV a udává počet otočení rotoru o jednu obrátku za 1 minutu na 1 Volt a to bez zatížení motoru (bez nasazených vrtulí). Pokud tedy máte např. motor 1500KV a baterii typu 6S (22,2 Volt), váš motor se bude otáčet maximální rychlostí 33300 rpm.
¶ Stack

Srdce dronu. Kombinace řídící jednotky a regulátorů pro motory.
¶ Řídicí jednotka (FC)
Řídící jednotka (FC – Flight Controller) je v podstatě takový malý počítač, jehož základem je MCU (Microcontroller Unit = mikrokontrolér) a další komponenty jako jsou senzory typu gyroskop, barometr, bluetooth, atd…Zároveň se k němu připojují nebo pájejí další periférní komponenty, jako je rádiový přijímač signálu (receiver), video vysílač (VTX), GPS modul, apod. Nejčastěji se pak FC prodávají společně s ESC jako “jeden” produkt, který se nazývá stack a který vám zaručuje kompatibilitu mezi oběma komponentami.
¶ MCU
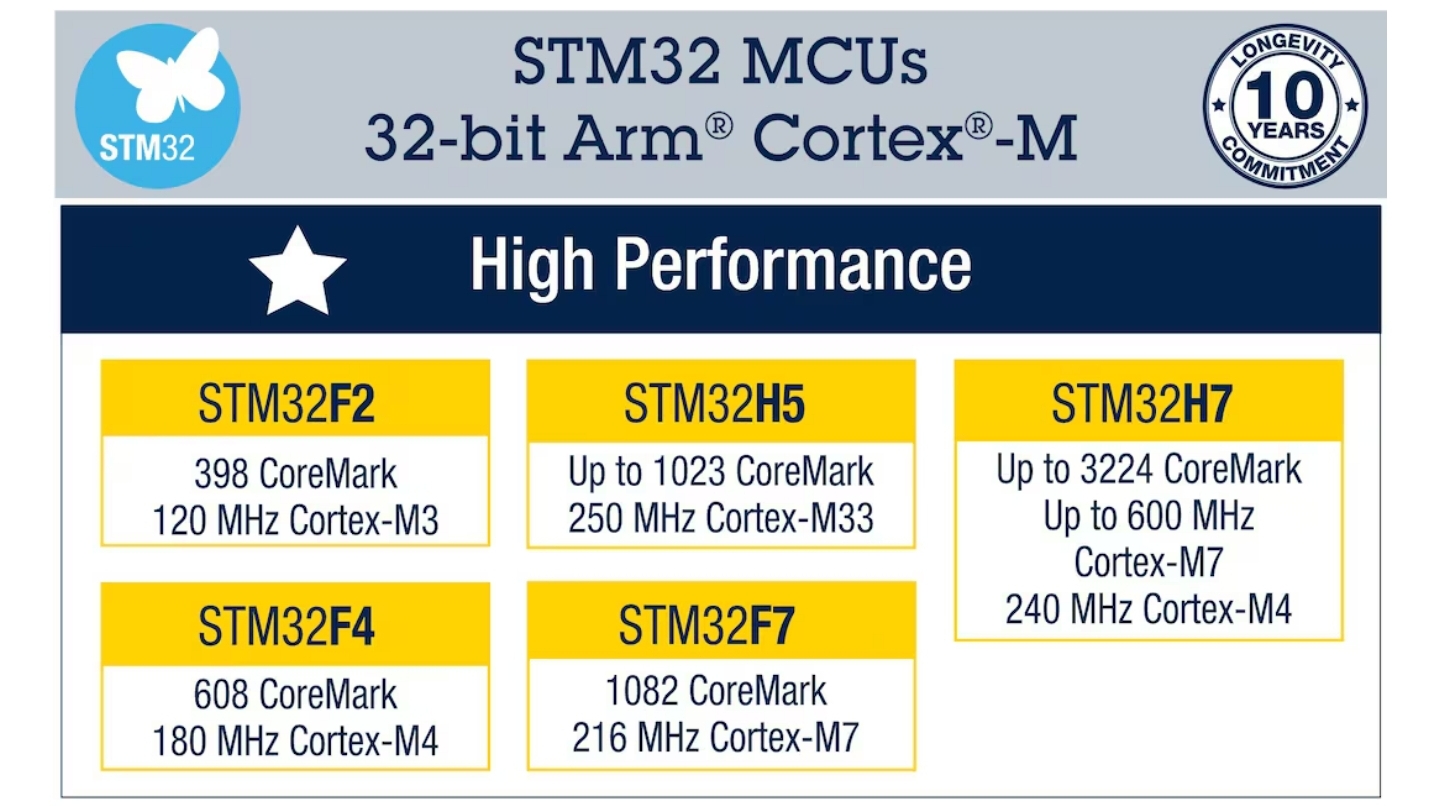
Většinou se jedná o MCU od společnosti STMicroelectronics. Nejčastěji to jsou MCu s označením STM32F4 nebo výkonnější STM32F7 a STM32H7. MCU je integrovaný čip, který obsahuje nejen procesor Arm Cortex®-M, ale také L1 cache, paměť (RAM, ROM nebo flash paměť), vstupy/výstupy (I/O) a další periferie, jako jsou časovače nebo A/D převodníky. Když by jsme měli srovnat MCU s klasickým počítačem, tak MCU je obvykle méně výkonný a má omezenou paměť (řádově kilobajty až megabajty). Je navržen tak, aby běžel na nízkých frekvencích a měl nízkou spotřebu energie, což ho činí vhodným pro zařízení napájená baterií nebo s nízkým odběrem. MCU typicky nevyužívá plnohodnotný operační systém, ale často pracuje s jednoduchým firmwarem nebo RTOS (Real-Time Operating System), který má minimální nároky a je optimalizovaný pro rychlé reakce na události, čehož právě využíváme u dronů a letadel, kdy potřebujeme, aby MCU rychle reagoval úpravou otáček motorů na změnu náklonu gyroskopu.
¶ Regulátor (ESC)

Regulátor (ESC – Electronic Speed Control) slouží k řízení otáček motorů na základě povelů z řídicí jednotky za použití vyššího napětí a proudu z baterie. Když bychom FC a ESC měli přirovnat k lidskému tělu, tak řídící jednotka je v podstatě mozkem dronu a regulátor s připojenými motory jsou pak svalovou soustavou dronu. Regulátory máme buď samostatné, které jsou určeny pro jeden motor a jsou převážně používané na letadlech a nebo tzv. 4-in-1, což jsou 4 regulátory na jedné desce plošných spojů a jsou určeny pro 4 motory dronu, resp. přesněji řečeno kvadrokoptéry.
Nejčastěji se pak ESC prodávají společně s FC jako “jeden” produkt, který se nazývá stack a který vám zaručuje kompatibilitu mezi oběma komponentami.
¶ FPV systém
FPV (first person view) je systém přenosu videa z dronu do brýlí či na displej pilota na zemi. FPV systém se skládá z několika komponent:
- Na dronu: VTX (Video trasmiter) je vysílač videa
- Kamera
- Anténa
- Na zemi
- VRX (Video receiver). Často integrovaný v brýlých
- Brýle či monitor pro zobrazení přenosu
Základní dělení FPV systémů je na digitální (DJI a Walksnail či HD Zero) a analogové. Více k digitálnímu FPV a jednotlivým druhům naleznete zde. Info o analogovém systému a jeho použití pak tady.
¶ Baterie
Baterie jsou jedním z klíčových komponentů FPV dronů, protože určují nejen dobu letu, ale i výkon a váhu dronu. V této sekci se podíváme na hlavní typy baterií používané v FPV , jejich rozdíly a základní principy nabíjení.
¶ Typy baterií
Nejenom v FPV dronech se uchytily převážně baterie na bázi Lithia, které jsou schopné dodat velké proudy a mají dobrý poměr hmotnosti a kapacity.
¶ LiPo (Lithium Polymer)
- Výkon: LiPo baterie mají vysokou hustotu energie a relativně nízkou hmotnost. Jsou schopny dodat velké vybíjecí proudy, což umožňuje dosáhnout velké dynamiky letu.
- Hmotnost a velikost: Obvykle lehčí a kompaktnější než Li-Ion pro stejnou kapacitu.
- Životnost: LiPo baterie mají nižší životnost a jsou náchylnější k poškození při nesprávném nabíjení či hlubokém vybití.
- Použití: Ideální pro krátké a intenzivní lety, jako jsou závody (racing) nebo freestyle létání.
¶ Li-Ion (Lithium-Ion)
- Výkon: Li-Ion baterie mají nižší C-rating, což znamená nižší vybíjecí proudy a tím méně výkonu. Při přetížení se velmi zahřívají a dochází k nevratnému poškození.
- Hmotnost a kapacita: Většinou poskytují vyšší kapacitu než LiPo při podobné hmotnosti, což z nich činí skvělou volbu pro dlouhé lety (long-range).
- Životnost: Mají delší životnost a jsou méně náchylné na poškození při nesprávném nabíjení.
- Použití: Kvůli nízkým vybíjecím proudům nejsou vhodné pro rychlé a prudké manévry, ale spíše pro klidné long range a cinematic létání.
¶ Počet článků a jejich zapojení
Články v bateriích mohou být zapojeny sériově nebo paralelně:
- Sériové zapojení zvyšuje napětí, ale zůstává kapacita (mAh). nicméně uložená energie (Wh) je násobek napětí a kapacity
- Paralelní zapojení zvyšuje kapacitu (mAh)a proudovou zatížitelnost (proud se rozloží mezi dvě baterie zapojené vedle sebe.
¶ Sériové zapojení
1S, 2S, 3S atd.: Každý článek (S) má nominální napětí přibližně 3,7 V a v plně nabitém stavu 4,2 V. Více článků znamená vyšší napětí, a tím i vyšší výkon.
Počet článků je třeba volit ohledem na požadovaný výkon dronu. Větší počet článků a tím vyšší napětí je schopno dodat vyšší výkon motorům. Nicméně je třeba brát ohled na dimenzovní motorů a jejich kV - otáčky na volt, aby dosahovali požadované hodnoty pro danou velikost vrtulí.
Zároveň s větším počtem článků roste hmotnost baterie a je tedy třeba balancovat mezi výkonem a hmotností. Ne vždy více výkonu dokáže vykompenzovat vyšší hmotnost a menší koptéry pak nemusí lítat dobře.
¶ Paralelní zapojení
1P, 2P atd.: Používá se při potřebě navýšení kapacity baterie nebo proudové zatížitelnosti. Takže zejména pro longrange baterie, kde pro dosažení dlouhé doby letu potřebujeme kapacitu co nejvyšší.
Zároveň se používá hlavně u Li-Ion baterií, které mají malou proudovou zatížitelnost a paralelním zapojením ji znásobí.
¶ Kapacita a uložená energie
Kapacita udává elektrický náboj, který je možné z článku získat. Udává se v Ah (Ampér-hodina). Ve výsledku určuje kolik energie je v baterii uloženo, tedy kolik jí můžeme odebrat a jak dlouho poletíme.
Celková energie baterie se udává ve Wh (Watt-hodina) a je rovna součinu kapacity a napětí. Tedy toto je číslo, které definuje jak dlouho na baterii poletíme.
- Příklad A - baterie 2S 5000 mAh
- takováto baterie má nabítá napětí 2 x 4,2 V = 8,4 V. Při kapacitě 5 Ah je v ní tedy uložena energie 42 Wh.
- Příklad B - baterie 6S 1800 mAh
- takováto baterie má nabítá napětí 6 x 4,2 V = 25,2 V. Při kapacitě 1,8 Ah je v ní tedy uložena energie 45 Wh.
Z příkladu je vidět, že baterie B, ačkoli má nižší kapacitu v Ah, energie v ní uložená je větší než v baterii A.
¶ Přijímač (Receiver)

Jedná se o přijímač rádiového signálu z vaši vysílačky, který předává řídící jednotce informace o tom, jestli chcete s dronem např. zatočit, stoupat, dát mu povel k návratu na místo vzletu, apod. I když existuje více protokolů, na kterých komunikuje vysílačka s přijímačem, uvedeme ty nejrozšířenější a to je protokol ELRS (ExpressLRS) a nebo TBS Crossfire. Oba jsou perfektní, ovšem ExpressLRS se stává čím dál více oblíbenější, jelikož se jedná o opensource protokol, který má skvělé parametry a neustále se vyvíjí. Zároveň pro něj existují levnější přijímače a vysílačky, což mu také značně nahrává co se popularity týče.
¶ Vrtule (Propellers)

Základní rozdělení vrtulí je podle počtu listů, velikosti listů v palcích a také podle stoupání listů vrtule. Pro drony s tzv. 5″ rámem tedy použijete 5″ vrtule, pro 7″ rám pak použijete ideálně 7″ vrtule, atd. Stoupání listu vrtulí pak udává, jestli se vrtule hodí spíše na pokldinější lítání a nebo na závodění.